
Шаговые двигатели
Шаговый двигатель – это электромеханичес
Основные параметры и характеристики шаговых двигателей
Специфика конструкции шаговых двигателей и многообразие режимов их работы вызывают необходимость оценивать эти двигатели по следующим параметрам: частоте собственных круговых колебаний; электромагнитным постоянным времени; коэффициенту внутреннего демпфирования и характеристикам – предельным механическим и предельным динамическим. Частота собственных круговых колебаний – это угловая частота колебаний ротора около устойчивого положения при отсутствии момента нагрузки. Она является обобщенным параметром, зависящим от момента инерции J, амплитуды максимального синхронизирующег
Электромагнитная постоянная времени обмоток управления характеризует скорость протекания электромагнитных переходных процессов. Часто для уменьшения Т эм последовательно с обмоткой управления включают добавочное сопротивление. Уменьшать постоянную времени необходимо потому, что чем она больше, тем до меньшего значения нарастает ток за время импульса напряжения, меньше становится синхронизирующий момент, а, следовательно, и допустимый момент сопротивления.
Коэффициент внутреннего демпфирования определяется отношением амплитуды потокосцепления ротора с фазой обмотки статора к ее активному сопротивлению. Этот параметр относится только к шаговым двигателям с активным ротором, поскольку его физический смысл заключается в образовании электромагнитног
Предельная механическая характеристика – это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы. С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю. Предельная динамическая характеристика – зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки.
Механическая характеристика шагового привода
Статический крутящий момент – момент удержания шагового двигателя (максимальный синхронизирующий момент). Статический режим работы – это режим, при котором по обмоткам статора протекает постоянный ток, создающий неподвижное в пространстве магнитное поле, а ротор не вращается.
Динамический крутящий момент – при задании высокой частоты отработки шагов крутящий момент падает, падение момента приводит к пропуску шагов и остановки двигателя.
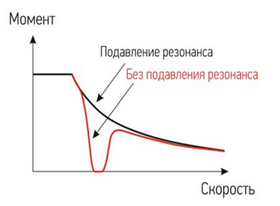
Резонанс – явление резкого возрастания амплитуды вынужденных колебаний, которое наступает при приближении частоты внешнего воздействия к некоторым значениям (резонансным частотам), определяемым свойствами системы. Шаговый двигатель сильно подвержен резонансу.
В момент, когда разность фаз момента и скорости достигает величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новый шаг становится слишком велика. При резонансе значительная часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значительном падении крутящего момента на валу. Накопленная кинетическая энергия ротора расходуется при возникновении резонанса примерно за 1-10 сек, поэтому разогнать двигатель можно, пройдя зону резонанса без последствий.
Резонанс шагового двигателя